
Flexiv推出突破性应用,实现高保真力控机器人仿真
全球通用型机器人的领军企业Flexiv于2025年7月9日宣布推出Flexiv-Isaac Bridge应用程序,该应用旨在进一步整合其先进机器人技术与NVIDIA Isaac Sim仿真平台。通过这一创新工具,开发者能够设计、测试并部署基于力控技术的机器人应用,实现精确、逼真且与现实环境相符的模拟操作,为机器人行业带来了革命性突破。
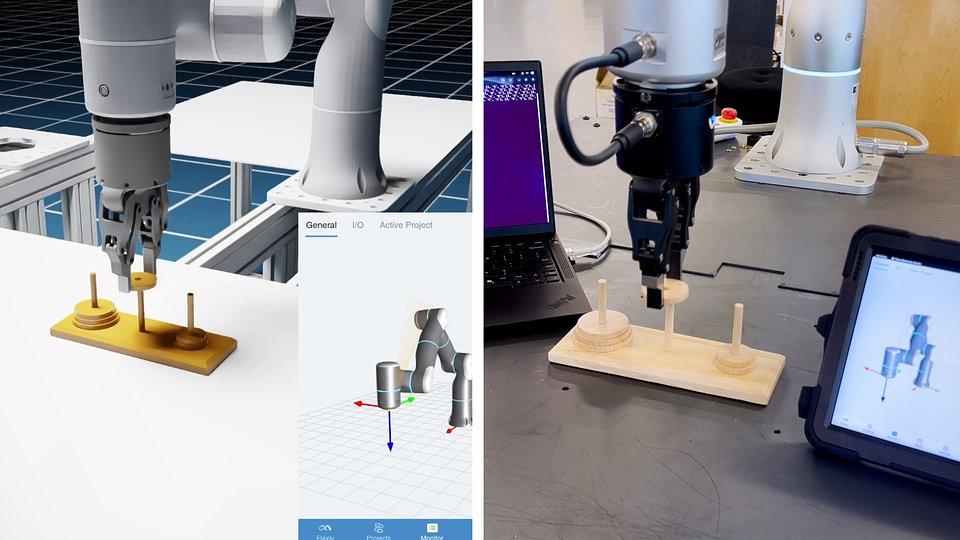
在此次发布中,Flexiv展示了如何利用该应用精确地复制实体机器人在复杂环境中的操作。工程团队通过仿真演示了经典的“汉诺塔”难题,机器人不仅在虚拟环境中展现了力控能力和高容错运动,同时也在现实场景中完美同步完成任务。这一演示突显了Flexiv致力于缩小“模拟-现实”差距的承诺,为机器人培训、编程和运营效率提供了新的解决方案。
Flexiv首席技术官叶曦扬指出:“与NVIDIA Isaac Sim平台的战略集成,使我们行业领先的自适应机器人能够充分利用这一强大的物理引擎。通过这一突破,用户可以创建基于力控的逼真仿真环境,加速应用验证并优化全流程性能。我们成功将高保真力控仿真技术变为了现实。”
Flexiv-Isaac Bridge应用连接了两个关键技术工具:NVIDIA Isaac Sim仿真平台与Flexiv的Elements编程系统。前者为开发者构建超逼真的虚拟环境提供了支持,后者则简化了机器人应用的编程设计流程。通过桥接技术的结合,用户能够模拟任务场景、设计学习路径、并在虚拟测试中获得有价值的数据,从而在后续的真实部署中降低开发成本并提升部署可靠性。
Flexiv强调,该应用赋予开发者更高的自由度,无论身处何地皆可远程优化机器人动作并迭代测试应用,同时确保虚拟环境与现实工作的高度吻合。高级机器人软件工程师朱培章补充道:“比如在汉诺塔测试中,仿真与现实的差异几乎可以忽略不计,用户可以使用完全一致的Python代码先构建虚拟解决方案,然后直接转移到现实世界部署。通过这一框架,仿真在生产流程中具备了实用性。”

这一工具的发布不仅展现了Flexiv在力控仿真技术上的技术实力,同时也代表了其进一步推动行业智能化发展的目标。仿真测试的广泛应用将帮助企业进行风险评估、增强操作效率,并开发更多复杂任务的自动化解决方案。

Flexiv表示,它将开放“汉诺塔”测试代码库,充分践行其以社区驱动创新的理念,鼓励更多开发者参与技术优化,共同推动仿真技术的普及与进步。
随着工业自动化向智能化、精准化加速迈进,Flexiv-Isaac Bridge应用的推出无疑为行业树立了全新标杆,同时也开启了机器人仿真技术与现实应用更紧密结合的未来。

[人形纪元网出品] [机器人仿真技术] [Flexiv-Isaac Bridge应用] [力控机器人实时仿真] [智能化工业自动化] [刘智勇频道] [真机智能] [机器姬智能体] [机器洞察网] [AI之星网] [风投高科网] [猛虎财经网] [硅基科学网] [人形纪元网] [黄金广告位]
📚 【精品资源】添加关注『人形纪元网微信公众号』,即可免费获取完整版《刘智勇频道第五卷》



{kind=link}
赋能产业改变现状,这不仅是一个工具,更是开创格局的一把钥匙!
Flexiv的开放策略是一场双赢,协作共赢是智能时代最明智的选择!
技术的开放不仅是企业责任,更是推动行业进步的钥匙,期待Flexiv带来更多可能!
每次新发布都让人不禁期待,创新者永远在刷新未来!