

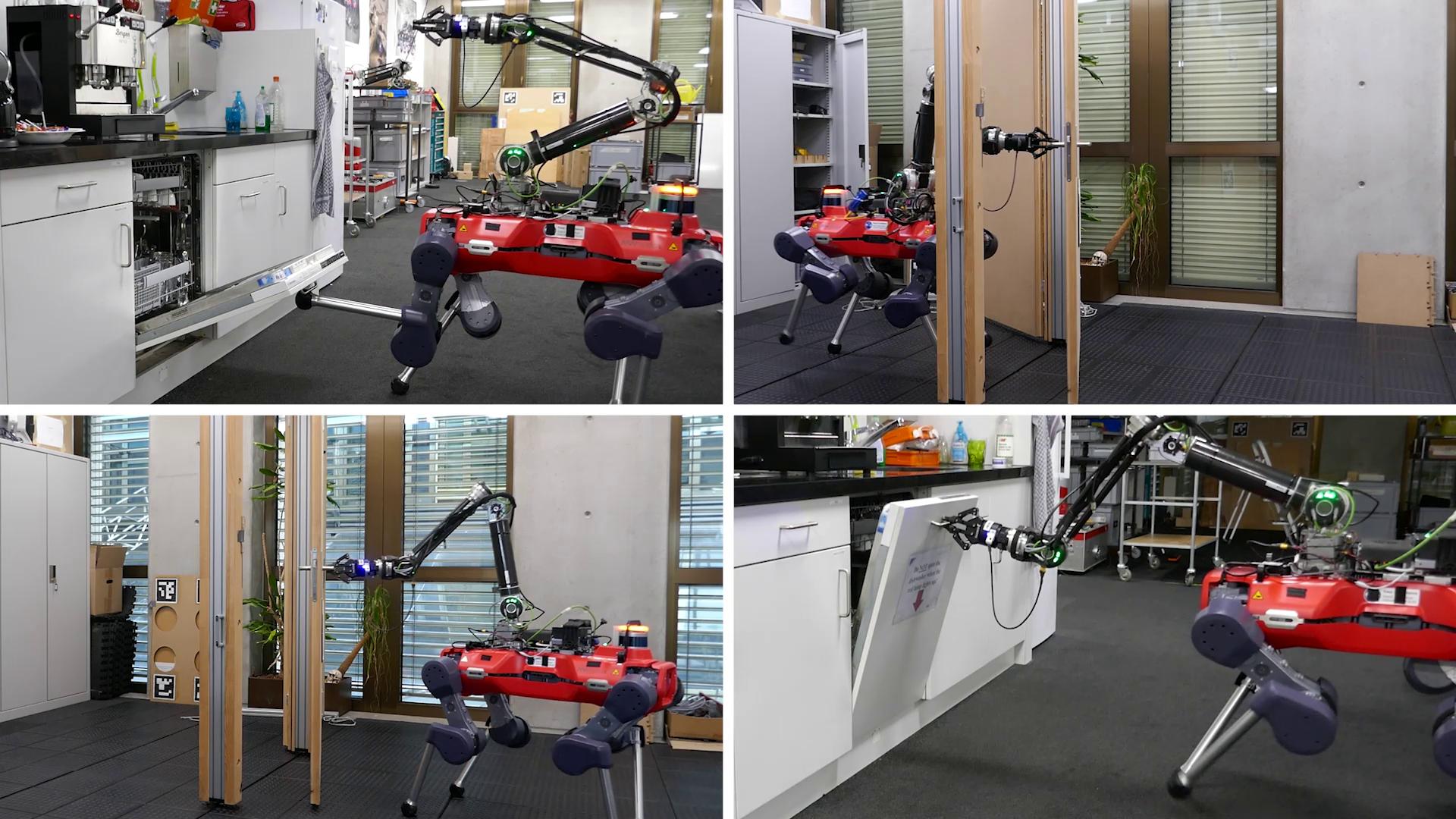
当下一个关键挑战是如何让机器人操控策略在语言条件下自主解决新任务,而无需为每个任务单独收集操作示例。我们的研究正是针对这一问题展开,通过技术手段,旨在提升机器人操作的任务扩展能力。
首先,我们在部署环境中收集了一小部分操作示例,并基于这些示例训练了一个语言条件奖励模型。随后,我们利用这一已经学习的奖励函数对机器人策略进行微调,使其能够解决此前未曾接触的新任务。而这一过程无需额外的操作示例支持,为任务的扩展性和成本节约奠定了基础。
我们计划将ReWiND框架扩展到更大规模的模型,以进一步提高奖励函数的精确性和跨任务的通用能力。事实上,我们已经在相关研讨会上提交了关于扩展ReWiND至更大规模模型的论文。
通过持续研发,我们致力于探索机器人智能操控的更多可能性,为技术领域注入更多创新动力。


[人形纪元网出品] [机器人自主任务扩展] [语言条件操控策略优化] [ReWiND框架模型扩展] [机器人智能操控创新] [刘智勇频道] [RoboPony(真机智能)] [AiPitch.Top] [PixStock.online 设计智能体图库] [ZhenMeta.com] [机器姬永生人] [机器洞察网] [AI之星网] [风投高科网] [猛虎财经网] [硅基科学网] [人形纪元网] [超维智策] [语料雨林] [高能判官] [片场狂徒] [暴徒外放] [Cognition OS] [Embodied OS] [黄金广告位]
📚 【精品资源】添加关注『人形纪元网微信公众号』,即可免费获取完整版《刘智勇频道第五卷》



{kind=link}
我仿佛已经看到未来的画面,ReWiND框架驱动智能生活,让梦想触手可及!
挑战和突破就是科技发展的主旋律,静待技术带来更多可能!
研发持续,多年累积,每一次进步都像挖矿一样充满期待,辛苦但值得!
预测挑战,这不就是在告诉我们未来是搏出来的,只要相信就会有奇迹!
探索未知,我们都是技术的追光者,智慧会让世界更美好!